推荐回答:
什么是电动助力转向系统电动助力转向系统的简介电动助力转向系统简称EPS,是直接由电动助力机直接向转向系统提供转向助力,所以相对于传统的液压助力转向系统来说,EP什么是电动助力转向系统
电动助力转向系统的简介
电动助力转向系统简称EPS,是直接由电动助力机直接向转向系统提供转向助力,所以相对于传统的液压助力转向系统来说,EPS节省了许多元器件,通过传感器传输电信号到ECU,ECU在根据电信号在不同车速下输送不同助力效果,在一定程度上更加节能和保护环境,而且相对于车主来说,加装了电动助力转向系统可以让车主在转向过程中更加容易操纵和灵活。
电动助力转向系统的优势
1减小燃油消耗:由于电动助力转向系统只在转向的时候,电机才会提供助力。相对于传统的液压助力转向是由发动机来带动转向油泵,从而实现助力转向,不管车辆是否处于转向状态都会消耗一定燃油。而电动助力转向只有在转向时才会工作,在不转向时并不消耗燃油,所以在一定程度上减少了燃油的消耗。
2可随车速进行调整:相比传统液压助力系统来说,电动助力可以通过ECU进行调整,在低速行驶的转向显得轻便,在高速时还具有稳定的操纵性,而不会高速转向时车辆打滑,降低了车辆的稳定性。
3维修方便:由于电动助力转向系统取消了传统的液压转向油泵等元器件,整个转向器作为一体,在维修的时候显得更方便。
4可与不同车型匹配:由于电动助力转向系统可以通过的电脑的设置来调整电动助力,可以调整到与大部分车型匹配,从而实现一种电动转向系统多车用的现象。
()
拓展:在不同驾驶条件下,电线控制转向系统与电动助力转向系统有何区别
麻烦看官老爷们右上角点击一下“关注”,方便您进行讨论和分享,感谢您的支持!
本头条号已与维权骑士签约,搬运必追究!



随着汽车技术的迅速发展,自动驾驶技术和汽车部分的研究取得了显著的进展,成为了当前汽车行业研发的重要方向之一。
在这个背景下,电线控制转向系统的开发也备受关注,以满足日益增长的驾驶舒适性需求。这种新型转向系统可以使车轮独立于方向盘进行移动,实现驾驶员与转向之间的解耦,从而为未来汽车驾驶带来更多的可能性。
本研究旨在不同驾驶条件下生成与特定汽车品牌相符的转向感觉,为此采用了两种不同的方法进行仿真研究,并与传统的电动助力转向系统进行比较。
现如今世界上针对汽车部分和完全自动驾驶功能的研究已经取得了重大进展,并且这个项目在研究和开发中也是十分重要的事项。
为了能在这种情况下同样满足客户对舒适性的需求,电线控制转向系统的开发也在不断推进,这种类型的转向允许车轮独立于方向盘移动,通过分离车轮和方向盘之间的机械连接,从而使驾驶员与之解耦。
与目前代表最先进技术水平的电机机械转向系统不同,电线控制转向系统需要合成产生驾驶员的反馈,一些科学研究已经开始研究不同的策略来产生转向感觉。
然而,本研究的目标是在不同驾驶条件下生成与品牌特定的转向感觉相对应的转向反馈,本研究为此采用了两种不同的方法进行仿真研究,并与一款系列生产的电动助力转向系统进行比较。
一种方法是基于模拟的齿条与齿轮力来产生转向盘扭矩。第二种方法是使用人工神经网络来产生所需的转向盘扭矩。这两种方法都基于来自生产车辆的记录测量数据,用于调整或训练算法。另一个重点是通过聚类来最小化神经网络的训练时间,并改善训练数据样本的分布。
我们会描述具有电线控制转向系统的车辆结构,并基于测量数据对模型进行了验证,以及展示两种方法以及优化和训练的过程,特别关注数据聚类以改善训练过程。最后也会展示了每种方法的结果,并进行彼此的比较。
本研究中的系统被安装在一辆C级车辆中,并在仿真模型中进行了表示,以下描述了车辆模型,以及方向盘、转向架执行器和仿真环境的模型。

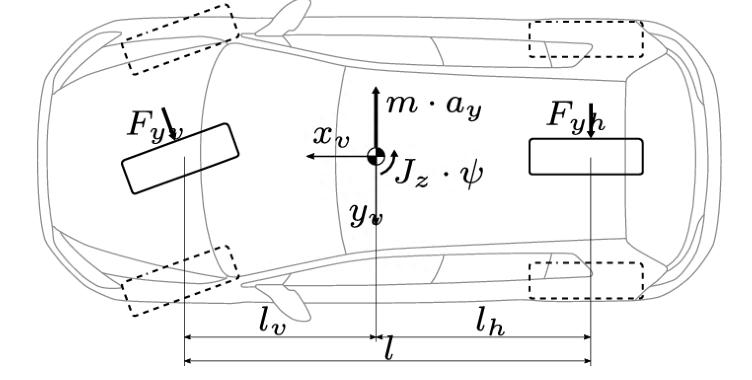
本研究采用了一种线性自行车模型来映射真实车辆的横向动力学。
以下微分方程描述了线性和角动量:
通过优化,已经将车辆模型的行为调整到了相应的真实车辆上,单轨模型通过包括车身的横摇行为以及横摇和侧向力转向的影响进行了增强。
为了能够描述侧向力的动态效应,本实验还采用了Böhm的模型。它对轮胎的行为进行建模,并考虑了松弛长度lr。
除了驾驶员的方向盘角度输入外,方向盘执行器还负责产生转向扭矩,从而让驾驶员感受到当前的驾驶状况。
方向盘通过一台永磁同步机与一种蜗轮蜗杆装置相连,类似于列式EPS。通过18:1的比率,伺服电机可以在方向盘上产生高达60 Nm的扭矩。
施加在方向盘上的扭矩通过连接方向盘和齿轮级之间的扭转杆元件来测量,该系统通过一个两质量振荡器元素进行建模,每个质量具有转动惯量J,并受到阻尼d和摩擦力Ff的影响。

在阻尼方面选择了线性方法,但为了考虑摩擦,本实验需要采用更复杂的方法,于是我们选用了Stribeck的摩擦建模。
为了对转向装置进行建模,研究中考虑了其机械特性和系统的位置控制器,从机械上讲,转向架执行器可以描述为一个具有惯性质量的系统,其上还受到摩擦力的影响,除了底盘力和执行器扭矩外。
因此,以下微分方程描述了系统行为:
转向架执行器的位置控制器也包含在模型中,这是一个级联控制器,控制齿条的目标位置以及目标速度。
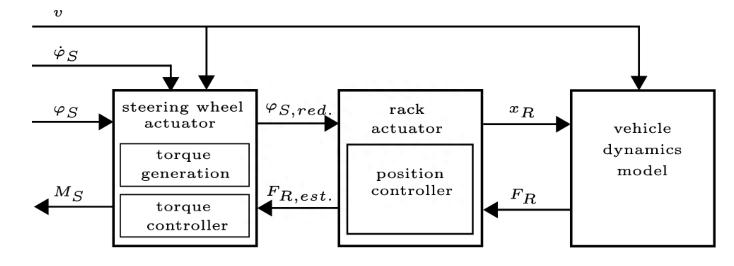
上述整个系统的组件在MATLAB/Simulink中进行了建模,模型的模块化结构以及各个组件之间的接口都已经在实验中整齐呈现。
将三个单独的组件进行建模的优势在于,每个单独的组件,如方向盘执行器,都可以基于其接口进行独立验证,并根据需要进行更换。这意味着不仅可以研究不同的转向系统,还可以在不同的车辆中模拟相同的转向系统。
我们已经将仿真环境的三个组件,通过将仿真结果与测量数据进行比较而单独进行了验证,实际测试数据中的偏差小于10%。
类似的操作已被用于验证转向架执行器模型,它已被证明能够提供必要的精度来表示物理系统,对于本研究的主题至关重要的是,它已经通过手动转向模式验证了反馈执行器模型。

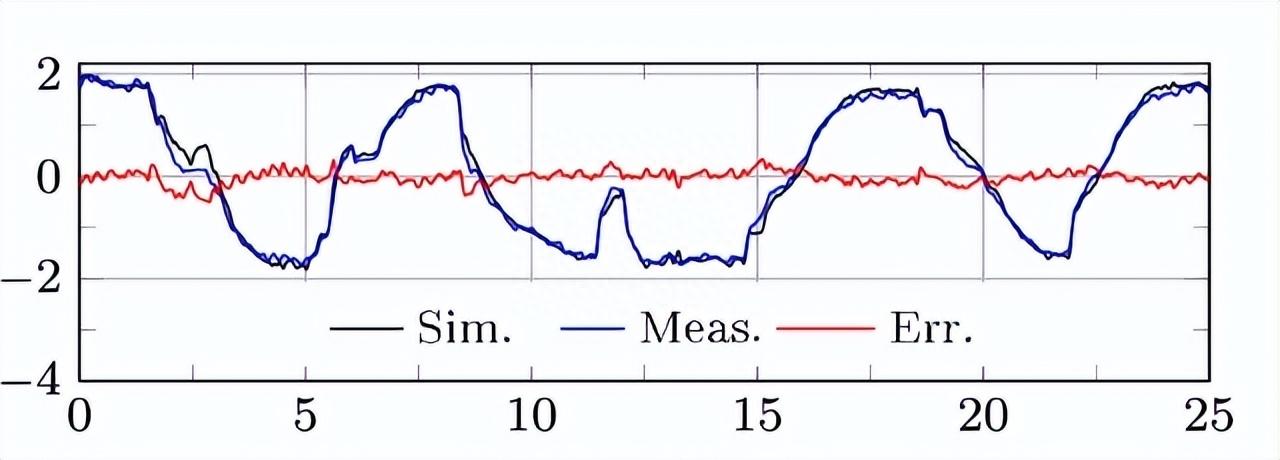
为了研究的严谨性,我们还对转向扭矩也进行了一番讨论和研究。
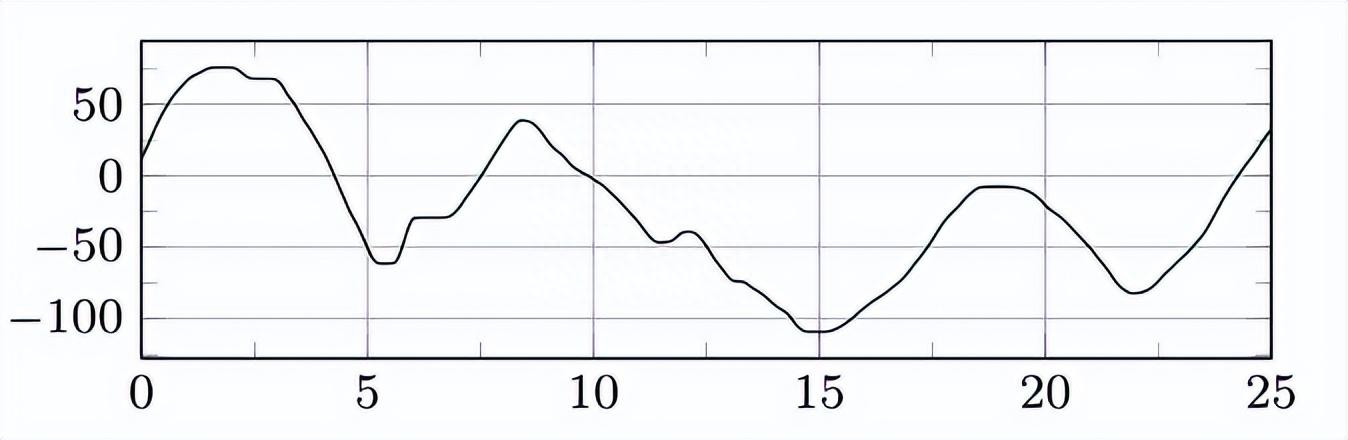
模拟和测量的转向扭矩以及产生的模拟误差显示在实验中,根据实验结果,已经确定了0.44–0.58 Nm的范围作为可感知的触觉阈值。
由于误差很少超过0.2 Nm,并且最大值不超过0.5 Nm,反馈执行器模型适合于充分表示物理执行器。
生成转向感觉的目标是尽可能地准确再现定义的目标转向感觉,在本研究中,转向感觉意图与电机助力转向系统相对应。
为了定义这种转向感觉,我们已对EPS系统进行了道路测试评估,并对构成方向盘扭矩的各种组件进行了建模,然后对其进行优化,使得生成的方向盘扭矩与参考方向盘扭矩相符。
方向盘扭矩由参考扭矩生成和扭矩控制器来表征,下面将对其进行详细描述。
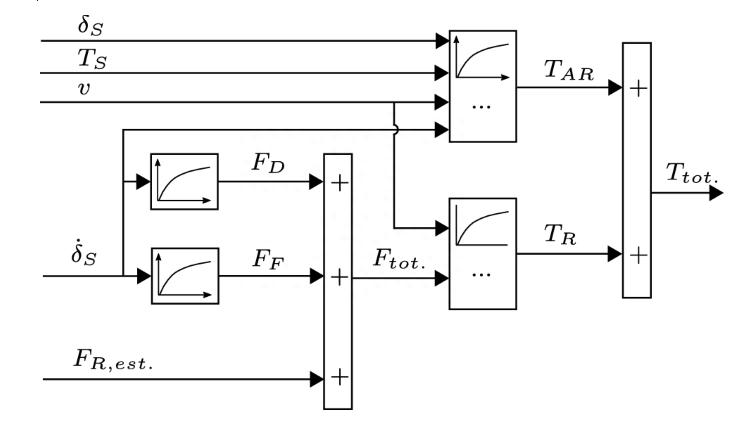
为了模拟方向盘扭矩,我们采用了类似的方法对EPS的产生扭矩的组件进行了建模,这个概念的组件具有两个目的,它们首先表示了EPS的转向功能和这种系统的机械特性。
模块化设计具有一个优势,即可以通过加权因子独立调整各个组件,而在本文中,这些模块被以不同的方式组合,并且它们的内容进行了调整。

能够用给定的电驱转向系统表示特定目标的方向盘扭矩行为的能力,在很大程度上受到方向盘执行器的所述特性的影响,惯性、阻尼和系统中的摩擦会产生扭矩,这些扭矩叠加在实际目标扭矩上,必须进行补偿。
这是通过控制器实现的。由于其积极的相位行为以及简单的操作和可调性,于是研究选择使用具有前馈控制的PD控制器来控制方向盘扭矩。
转向感觉的优化分为两个步骤,首先我们优化了方向盘扭矩的扭矩控制器这是基于方向盘执行器仿真模型对目标扭矩步跃响应的反应进行的,优化的标准包括控制器的响应时间和最大超调量。
控制器优化后,就开始对目标扭矩生成模块进行了优化,通过这种方式,可以将控制器行为纳入到目标扭矩的优化中,并因此在目标扭矩生成的设计中加以考虑。
为了优化目标扭矩生成,使用了由车辆动力学、齿条和方向盘执行器组成的完整模型,基于两种驾驶操作进行了优化。
此外,为了减少优化时间,对于本研究的范围,算法的调整和优化仅限于恒定速度为100 km/h的情况。
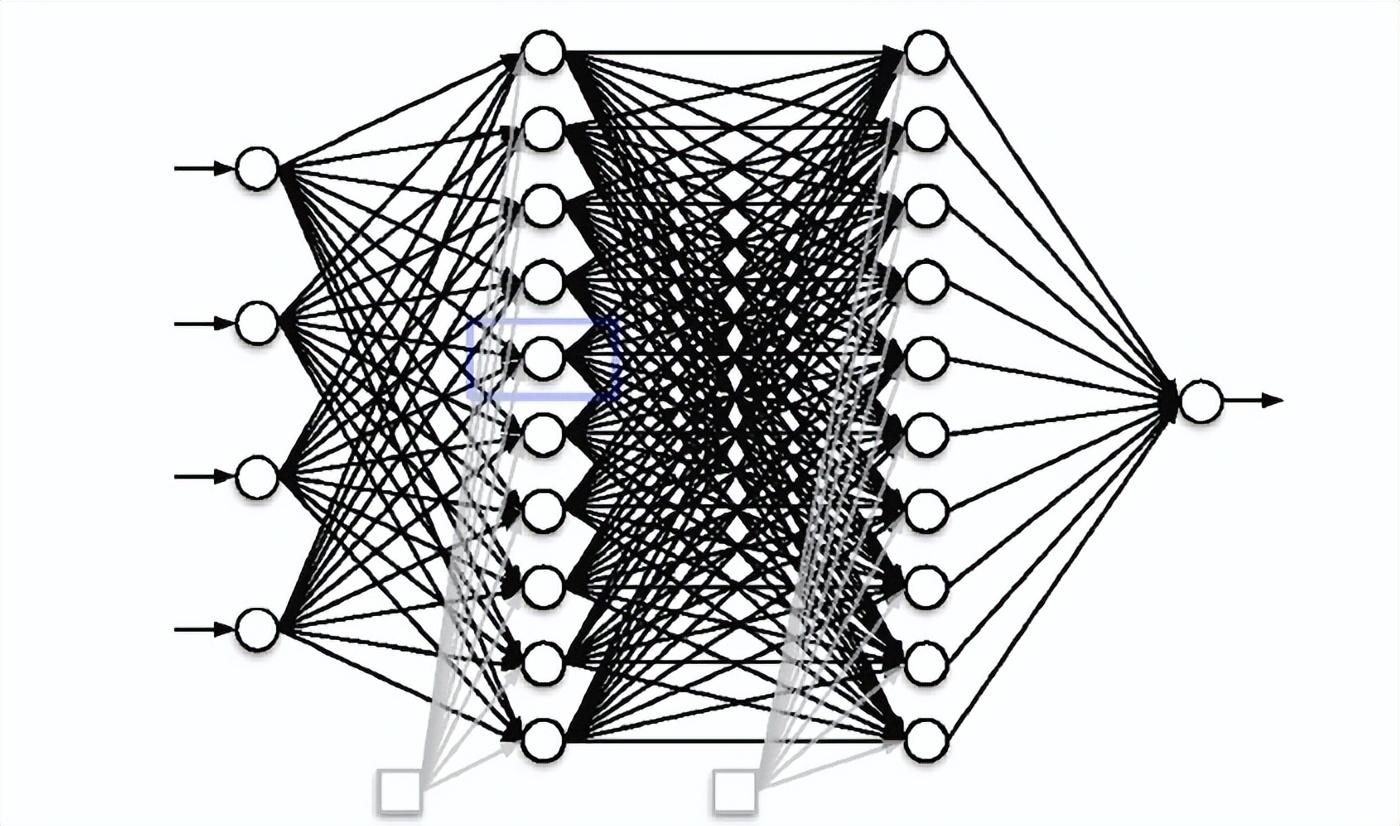
作为一种在驾驶电控转向车辆中映射转向感觉的无模型方法,在本文中也使用到了神经网络,这种方法在之前已经详细描述过。
实验中研究了在0到100 km/h之间映射可变驾驶操作,并证明了神经网络基本适用于高度拟合的安全稳态车辆设计。
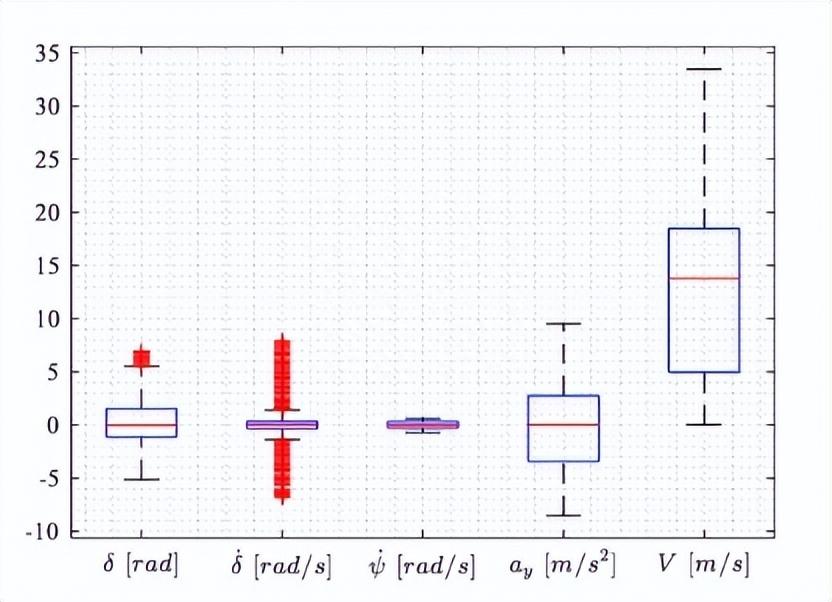
在这两项研究中,我们采用了对不同驾驶操作的主观选择,以实现对研究测试车辆的整体考虑,并为网络训练提供了均匀分布的相关数据点。
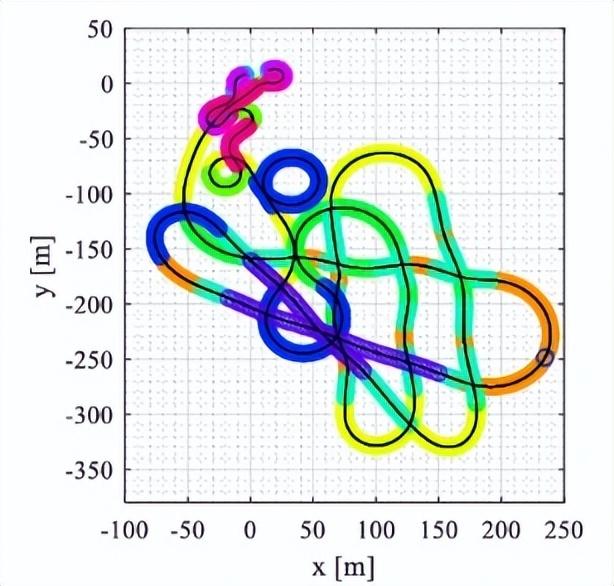
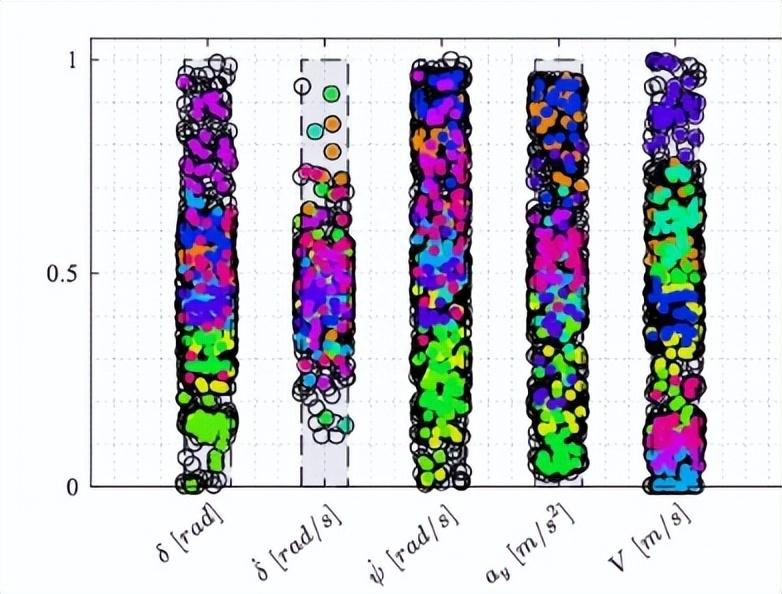
为了提高训练性能、泛化性能和网络训练的计算时间,在本研究中,集成了一种聚类方法作为额外的预处理步骤。
总体目标是在网络训练的广泛动态范围内提供均匀分布的信息,并同时通过从训练数据中删除不太相关或冗余的数据并将其整合到测试数据集中来减小训练数据集的大小。

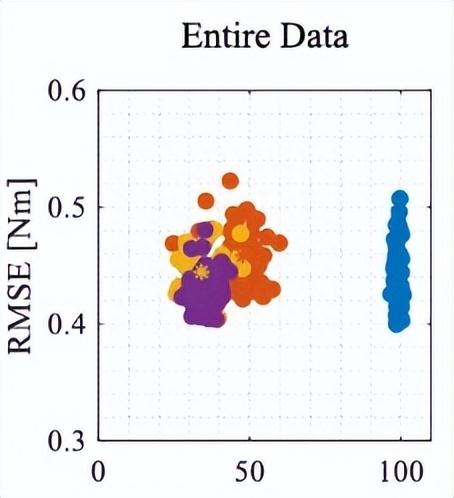
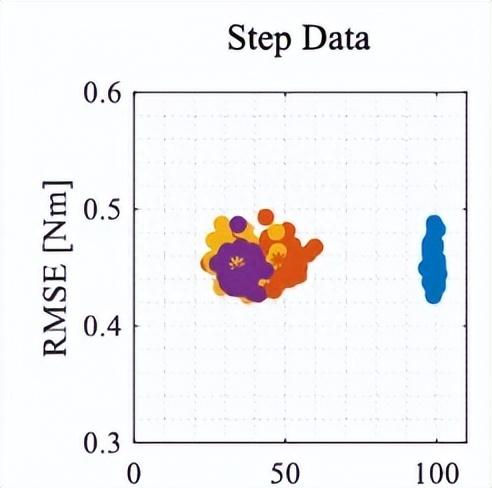
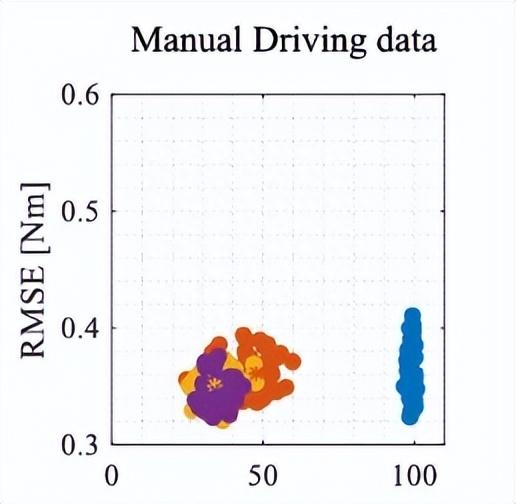
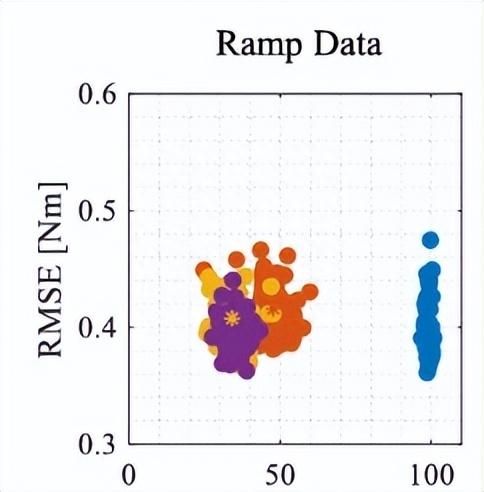
在本节中,将比较使用聚类方法进行数据集预处理的结果与未经处理的数据,然后再比较不同的转向扭矩建模方法。
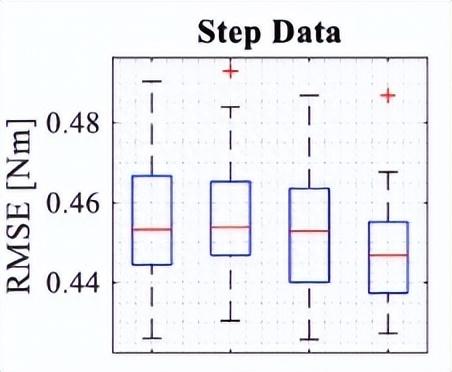
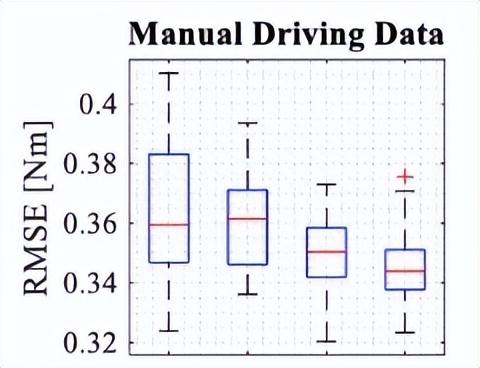
为了进行比较,首先对三种不同簇大小的50个前馈网络和50个使用未经处理的手动驾驶数据集进行了训练。
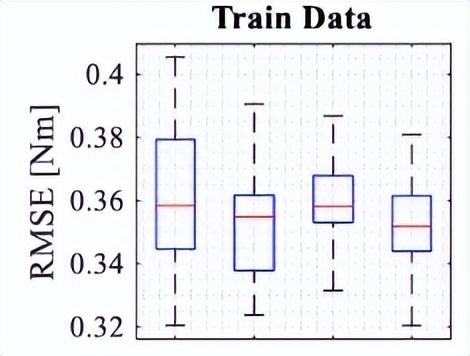
从实验中可以清楚地看出,在将数据集分成更多簇的训练数据集中,误差传播方面的结果明显优于使用所有可用手动数据点进行训练的网络。
在几乎所有操纵中,分成20个簇的数据集生成的误差传播更小,在40个簇中,可以观察到在大多数操纵中RMSE的改进,特别是在测试数据中明显。
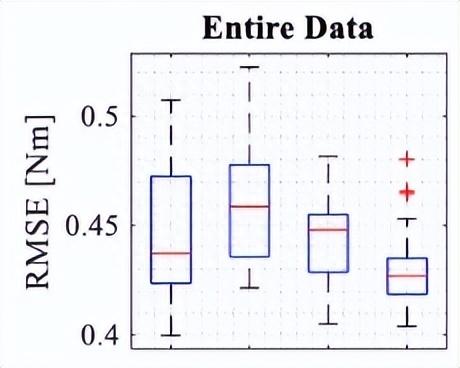
只有在少数簇的情况下,无法直接检测到网络性能的优势,而结果表明,通过适当数量的簇,可以为训练的稳健性以及训练时间产生明显的增值,将来优化确定簇数的方法可能会进一步提高该方法的效率。
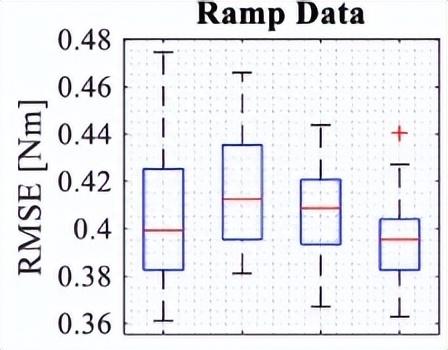
在本文中我们展示了两种生成转向感的方法的结果,它们分别与系列生产EPS系统的测得转向扭矩进行了比较。
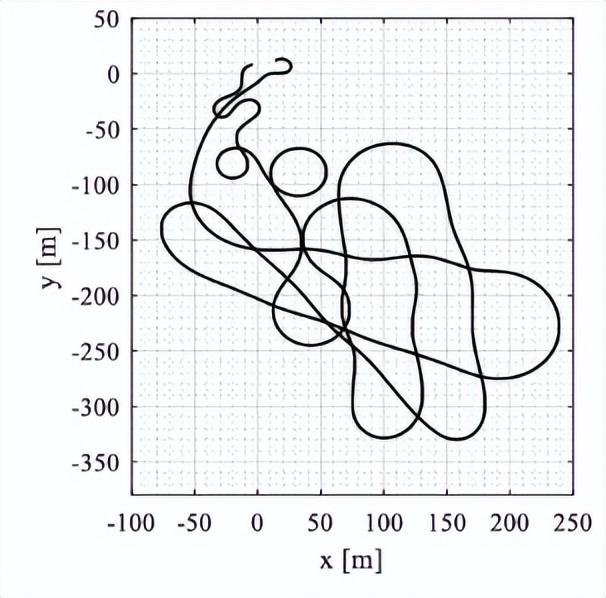
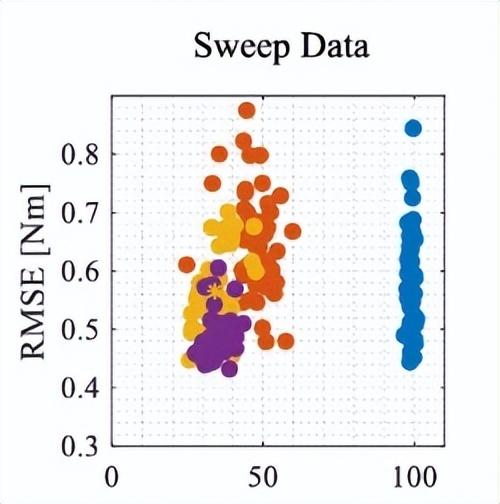
这两种非常不同的方法各自具有优点和缺点,我们会使用三种驾驶操纵进行评估,首先研究使用了转向机器人进行了两个合成操纵,并测量了一个手动驾驶情况。
还有一种生成转向感的方法是模块化地模拟用于EPS系统方向盘扭矩的真实世界现象和算法,模块化方法的参数已经优化,以产生最接近真实车辆的转向感。
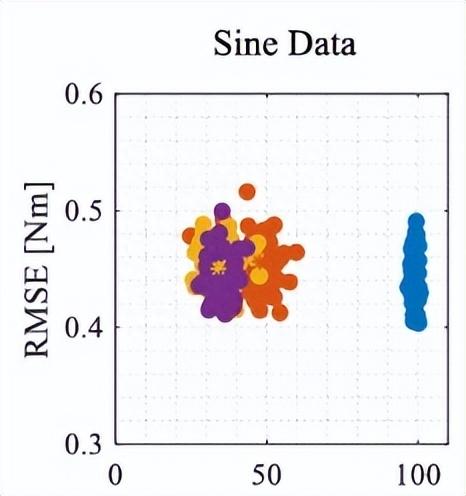
由实验结果可以得出,正弦操纵对于神经网络方法来说是困难的,在操纵中看到的不一致和较大的误差可以归因于神经网络在训练过程中用于更高方向盘频率的信息不足以及稍微的延迟,这在训练网络时变得明显。
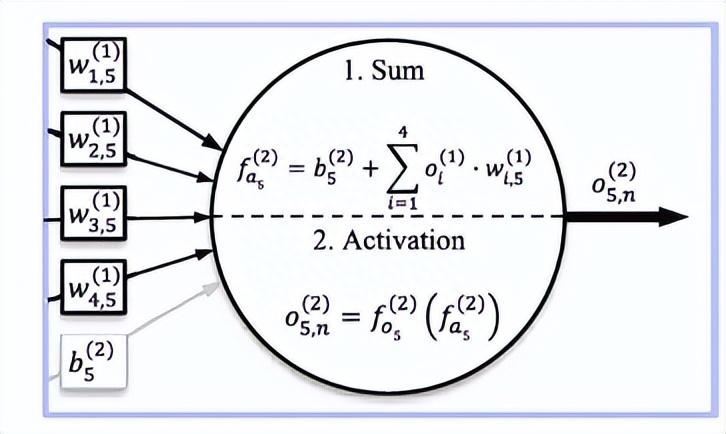
随着频率的增加,神经网络与EPS方向盘扭矩之间的延迟变得更加明显,此外,神经网络使用五个输入进行训练,而不仅仅是方向盘角度和速度。
在正弦操纵中,方向盘角频率增加以创建正弦扫频,从而产生更高的方向盘角速度,但降低了偏航率和横向加速度。
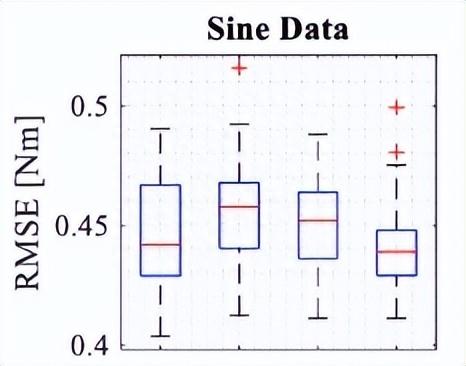
从结果中可以看出,神经网络更加强调偏航率和横向加速度,偏航率和横向加速度减小或保持恒定时,产生的扭矩减小或保持恒定,而真实的EPS扭矩增加或保持恒定。
总而言之,可以说两种方法都可以用于充分建模电动助力转向(EPS)系统的转向感,而不会引起线控制转向系统的问题。
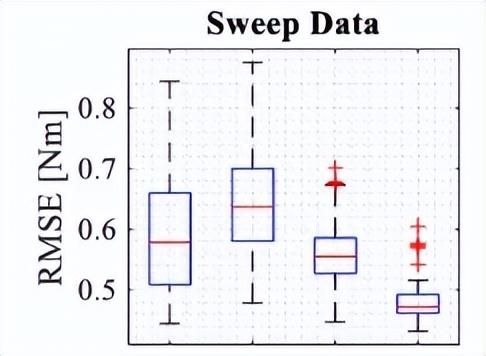

在本研究中,对线控转向系统的转向感建模进行了两种不同方法的考察,目标是在定义的操纵中产生与EPS系统类似的转向扭矩。
研究表明,两种方法都适用于在线控转向系统上表示EPS系统的转向感,每种方法都有其自身的优势和缺点。
拓展:带你深入了解电动助力转向系统
与传统液压助力转向系统相比,电动助力转向系统(EPS)具有很多优势,如结构紧凑,便于维护,能够满足智能驾驶及自动驾驶等新技术的需求,并且可以提升燃油经济性等,因此它成为了目前在乘用车上应用最广泛的动力转向系统。
电动助力转向系统与液压助力转向系统最主要的区别,就是取消了液压系统,通过电机提供动力,控制单元可根据车速及驾驶员施加在方向盘上的力判断需要输出的辅助力矩,来控制转向系统,因此电动助力转向系统既能实现低速转向时的轻便性,又能保证高速转向的操控稳定。

今天我们就以几类EPS产品为例,为大家详细介绍,电动助力转向系统的工作原理。
01
管柱式电动助力转向系统(EPSc)
这类转向系统之所以称为管柱式,是因为扭矩传感器和助力机构装在了转向管柱芯轴上,下面连接一个机械转向机。可以理解为在机械转向管柱上,加装了一套电动驱动装置,包括电机、蜗轮蜗杆、扭矩传感器、扭杆和控制单元。

动力传递方向如下:
电机→蜗杆→蜗轮→转向管柱芯轴→转向器小齿轮→转向器齿条
这种类型的转向系统具有占用空间小,成本较低,助力响应性能较好的特点,适用于小排量的中小型轿车。
02
单小齿轮电动助力转向系统(EPSp)
单小齿轮电动助力转向系统的扭矩传感器和助力机构装在转向器的小齿轮轴上,电动马达输出的扭矩通过蜗轮蜗杆减速机构也作用在小齿轮上。与管柱式相比,电机距离转向机构更近,传动效率也就更高。

动力传递方向如下:
电机→蜗杆→蜗轮→转向器小齿轮→转向器齿条
这种类型的转向系统可以提供比EPSc转向系统更大的助力,具有更高的安全性和操控路感,适用于紧凑型SUV车型。
03
双小齿轮式电动助力转向系统(EPSdp)
管柱式和单小齿轮式电动助力转向系统虽然助力机构位置不同,但他们实际上都是驱动的转向管柱,而双小齿轮式电动助力转向系统则不同,它是直接驱动的转向器的齿条。
这种类型的转向系统具有两个转向小齿轮,也就是在转向器驱动小齿轮的旁边,又增加了一个辅助小齿轮,同样用于驱动齿条。助力机构就安装在这个辅助小齿轮轴上,扭矩传感器装在另一个驱动小齿轮上。

动力传递方向如下:
电机→蜗杆→蜗轮→辅助小齿轮→转向器齿条
与单小齿轮(EPSp)的系统相比,传感器和助力机构分离,因此驱动小齿轮不受转向机传动比的约束,可以提供更大的助力,适用于中型汽车。
04
平行轴式电动助力转向系统(EPSapa)
平行轴式电动助力转向系统与双小齿轮式电动助力转向系统一样,也是通过驱动齿条来提供助力,不同之处在于平行轴式不再采用蜗轮蜗杆及辅助小齿轮来传递助力,而是采用带传动减速机构(循环球式助力)。

动力传递方向如下:
电机→带传动减速机构→转向器齿条
平行轴式电动助力转向系统传动效率更高,能提供更大的助力,可以满足对转向助力要求较高的车型,如中型汽车,中、大型SUV和轻型商用车。
随着技术的不断发展,电动助力转向系统已经不再局限于适用中小型车辆。管柱式、单小齿轮式、双小齿轮式和平行轴式电动助力转向系统的助力性能是递进的,可以适用于不同级别车辆的需求,未来的应用范围也将更广。
文章来源:博世汽车售后